
- 248
- 8
-


独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破
v4.65.72.28 安卓版

独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破
v3.48.28.91 安卓版

独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破
v7.17.32.98 安卓版

独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破
v1.68.66.66 安卓版

独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破
v1.38.18.83 安卓版

独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破
v5.10.39.91 安卓版

独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破
v4.99.64.24 安卓版

独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破
v1.27.84.51 安卓版

独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破
v5.29.47.90 安卓版

独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破
v3.67.99.03 安卓版

独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破
v0.40.09.56 安卓版

独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破
v3.27.82.72 安卓版
独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破
v7.93.71.58 安卓版

独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破
v0.43.52.70 安卓版

独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破
v5.74.27.30 安卓版

独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破
v8.42.70.13 安卓版

独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破
v6.15.97.85 安卓版

独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破
v4.79.54.47 安卓版

独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破
v0.09.58.62 安卓版

独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破
v2.02.94.36 安卓版

独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破
v5.28.31.60 安卓版
独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破
v2.88.22.80 安卓版

独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破
v4.60.81.02 安卓版

独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破
v7.79.10.15 安卓版
| 分类:单机 / 冒险解谜 | 大小:3.4MB | 授权:免费游戏 |
| 语言:中文 | 更新:2025-10-19 23:52 | 等级: |
| 平台:Android | 厂商: 独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破股份有限公司 | 官网:暂无 |
|
权限:
查看
允许程序访问网络. |
备案:湘ICP备2023018554号-3A | |
| 标签: 独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破 独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破最新版 独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破中文版 | ||
- 详情
- 介绍
- 猜你喜欢
- 相关版本
截图




内容详情
独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破游戏介绍
⚾2025-10-19 23:51 「百科/秒懂百科」【 独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破】🍓支持:32/64bi🐯系统类型:(官方)官方网站IOS/Android通用版/手机APP(2024APP下载)《独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破》
🏈2025-10-19 20:01 「百科/秒懂百科」【 独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破】🍌支持:32/64bi🦈系统类型:(官方)官方网站IOS/Android通用版/手机APP(2024APP下载)《独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破》
🏊2025-10-20 04:27 「百科/秒懂百科」【 独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破】🐳支持:32/64bi🍒系统类型:(官方)官方网站IOS/Android通用版/手机APP(2024APP下载)《独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破》
🦈2025-10-19 22:26 「百科/秒懂百科」【 独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破】🐰支持:32/64bi🐍系统类型:(官方)官方网站IOS/Android通用版/手机APP(2024APP下载)《独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破》
🐬2025-10-20 06:42 「百科/秒懂百科」【 独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破】🐙支持:32/64bi🥌系统类型:(官方)官方网站IOS/Android通用版/手机APP(2024APP下载)《独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破》
独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破版本特色
1. 🐪「科普」🏄 独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破官网-APP下载🎾🥑🦊支持:winall/win7/win10/win11🐦系统类型:独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破下载(2024全站)最新版本IOS/安卓官方入口v8.15.81.21(安全平台)登录入口🍁《独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破》
2. 🤸「科普盘点」🐱 独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破官网-APP下载🎾🥑🦊支持:winall/win7/win10/win11🐦系统类型:独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破下载(2024全站)最新版本IOS/安卓官方入口v0.73.61.58(安全平台)登录入口🍁《独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破》
3. 🍂「分享下」🚴 独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破官网-APP下载🎾🥑🦊支持:winall/win7/win10/win11🐦系统类型:独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破下载(2024全站)最新版本IOS/安卓官方入口v9.51.14.50(安全平台)登录入口🍁《独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破》
4. 🏹「强烈推荐」🤼♀️ 独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破官网-APP下载🎾🥑🦊支持:winall/win7/win10/win11🐦系统类型:独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破下载(2024全站)最新版本IOS/安卓官方入口v5.85.24.99(安全平台)登录入口🍁《独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破》
5. 🐪「重大通报」🏌️ 独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破官网-APP下载🎾🥑🦊支持:winall/win7/win10/win11🐦系统类型:独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破下载(2024全站)最新版本IOS/安卓官方入口v2.05.26.00(安全平台)登录入口🍁《独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破》
6. 🐢「返利不限」🌳 独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破官网-APP下载🎾🥑🦊支持:winall/win7/win10/win11🐦系统类型:独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破下载(2024全站)最新版本IOS/安卓官方入口v0.91.44.28(安全平台)登录入口🍁《独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破》
7. 🏐「欢迎来到」🏀 独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破官网-APP下载🎾🥑🦊支持:winall/win7/win10/win11🐦系统类型:独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破下载(2024全站)最新版本IOS/安卓官方入口v1.96.77.83(安全平台)登录入口🍁《独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破》
8. 🌸「娱乐首选」🦆 独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破官网-APP下载🎾🥑🦊支持:winall/win7/win10/win11🐦系统类型:独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破下载(2024全站)最新版本IOS/安卓官方入口v4.79.96.59(安全平台)登录入口🍁《独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破》
9. ⛳「免费试玩」🤾 独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破官网-APP下载🎾🥑🦊支持:winall/win7/win10/win11🐦系统类型:独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破下载(2024全站)最新版本IOS/安卓官方入口v6.41.60.58(安全平台)登录入口🍁《独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破》
独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破下载方式:
①通过浏览器下载
打开“独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破”手机浏览器(例如百度浏览器)。在搜索框中输入您想要下载的应用的全名,点击下载链接【blog.blog.blog.m.mobile.www.www.share.mobile.m.m.zyxyai.com】网址,下载完成后点击“允许安装”。
②使用自带的软件商店
打开“独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破”的手机自带的“软件商店”(也叫应用商店)。在推荐中选择您想要下载的软件,或者使用搜索功能找到您需要的应用。点击“安装”即 可开始下载和安装。
③使用下载资源
有时您可以从“”其他人那里获取已经下载好的应用资源。使用类似百度网盘的工具下载资源。下载完成后,进行安全扫描以确保没有携带不 安全病毒,然后点击安装。
独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破安装步骤:
🦛🤽🏇第一步:🏀访问独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破官方网站或可靠的软件下载平台:访问(http://blog.blog.blog.m.mobile.www.www.share.mobile.m.m.zyxyai.com/)确保您从官方网站或者其他可信的软件下载网站获取软件,这可以避免下载到恶意软件。
🏌️🚴🐌第二步:💐选择软件版本:根据您的操作系统(如 Windows、Mac、Linux)选择合适的软件版本。有时候还需要根据系统的位数(32位或64位)来选择独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破。
🐋🛺🦁第三步:🐼 下载独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破软件:点击下载链接或按钮开始下载。根据您的浏览器设置,可能会询问您保存位置。
⛳🐳🏐第四步:💐检查并安装软件: 在安装前,您可以使用 杀毒软件对下载的文件进行扫描,确保独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破软件安全无恶意代码。 双击下载的安装文件开始安装过程。根据提示完成安装步骤,这可能包括接受许可协议、选择安装位置、配置安装选项等。
🌰🦘🏂第五步:🦘启动软件:安装完成后,通常会在桌面或开始菜单创建软件快捷方式,点击即可启动使用独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破软件。
🎋🏋️🐮第六步:🏈更新和激活(如果需要): 第一次启动独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破软件时,可能需要联网激活或注册。 检查是否有可用的软件更新,以确保使用的是最新版本,这有助于修复已知的错误和提高软件性能。
特别说明:独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破软件园提供的安装包中含有安卓模拟器和软件APK文件,电脑版需要先安装模拟器,然后再安装APK文件。
独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破使用讲解
🎢第一步:选择/拖拽文件至软件中点击“🥉添加独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破”按钮从电脑文件夹选择文件《🐢🧸blog.blog.blog.m.mobile.www.www.share.mobile.m.m.zyxyai.com》,或者直接拖拽文件到软件界面。

🥀第二步:选择需要转换的文件格式 打开软件界面选择你需要的功能,独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破支持,PDF互转Word,PDF互转Excel,PDF互转PPT,PDF转图片等。

🍃第三步:点击【开始转换】按钮点击“开始转换”按钮, 开始文件格式转换。等待转换成功后,即可打开文件。三步操作,顺利完成文件格式的转换。

进入独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破教程
1.打开独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破,进入独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破前加载界面。
2.打开修改器
3.狂按ctrl+f1,当听到系统“滴”的一声。
4.点击进入独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破,打开选关界面。
5.关闭修改器(不然容易闪退)
以上就是没有记录的使用方法,希望能帮助大家。
独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破特点
🏋️♀️2025-10-19 23:46 🍏MBAChina🐮【 独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破 】系统类型:独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破(官方)官方网站IOS/Android通用版/手机APP(2024APP)【下载次数18816】🤾🏑🍓支持:winall/win7/win10/win11🐠🍃现在下载,新用户还送新人礼包🐙独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破
🥇2025-10-20 01:41 🤼♀️欢迎来到🎾【 独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破 】系统类型:独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破(官方)官方网站IOS/Android通用版/手机APP(2024APP)【下载次数03241】🌴🦨🎾支持:winall/win7/win10/win11🌿🐶现在下载,新用户还送新人礼包🦇独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破
🥋2025-10-20 05:19 🦊HOT🐸【 独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破 】系统类型:独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破(官方)官方网站IOS/Android通用版/手机APP(2024APP)【下载次数70349】🤼⛷️🦐支持:winall/win7/win10/win11🏀🏋️♀️现在下载,新用户还送新人礼包🐯独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破
🤺2025-10-20 07:50 🦎娱乐首选🍊【 独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破 】系统类型:独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破(官方)官方网站IOS/Android通用版/手机APP(2024APP)【下载次数48034】🍐🦧🐮支持:winall/win7/win10/win11🥋🏈现在下载,新用户还送新人礼包🦢独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破
🚵2025-10-19 21:29 👾返利不限🏏?【 独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破 】系统类型:独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破(官方)官方网站IOS/Android通用版/手机APP(2024APP)【下载次数04519】🏂🥇🍊支持:winall/win7/win10/win11🍒👾现在下载,新用户还送新人礼包🍁独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破
相关介绍
🤾ωειcοmε🌴【 独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破 】🐺🦁🍊系统类型:独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破(官方)官方网站-IOS/安卓通用版/手机app🌵支持:winall/win7/win10/win11🌳🌿🌻【下载次数999】🐜🎴现在下载,新用户还送新人礼包🀄独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破
独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破2024更新“嗯。”小灰皮脸上顿时绽放出笑容,狠狠地点了点头
> 厂商新闻《独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破》特朗普继续对日本施压:日本需要开放市场 时间:2025-10-20 07:51
- 编辑:CN
当自动驾驶机器人行驶在城市的人行道场景,算法会有效还是失灵呢?
这是一种比行驶在道路上更复杂、更具有不可预测情况的现实场景:一方面,机器人面对使用电动轮椅的老人、遛狗的人、婴儿推车、突然冲出马路的孩子等复杂的情况;另一方面,人行道还可能出现坑洼、斜坡等路况。
最近,DeepTech 关注到美国加州大学洛杉矶分校(UCLA,University of California,Los Angeles)副教授周博磊加入美国机器人初创公司 Coco Robotics,并在该公司新成立的 Physical AI Lab 担任首席 AI 科学家。我们通过与周博磊的交流,试图从产学研方面揭开人行道自动驾驶的“神秘面纱”。
(来源:周博磊)
从模拟到现实:让自动驾驶走在人行道
周博磊先后在上海交通大学和香港中文大学获得学士和硕士学位,然后在美国麻省理工学院获得博士学位。此前,他曾在香港中文大学担任助理教授,并凭借“使人工智能模型更易于人类理解和信赖”,成为 2020 年《麻省理工科技评论》“35 岁以下科技创新者”亚太区入选者之一。目前,周博磊实验室的研究方向是计算机视觉和机器学习,致力于城市机器人交互,并于近期将研究方向聚焦于人行道自动驾驶方向。
他早期研究的类别激活映射(CAM,Class Activation Mapping)技术 [1] 和网络剖析(Network Dissection)[2] 等一系列工作,可应用于自动驾驶、医学影像诊断和医疗保健等领域,为目前的研究理念打下了坚实的基础。无论是设计模型、部署模型,还是训练模型,模型的可解释性都是一个非常重要的因素。在机器人应用中,当机器人在现实生活中做出错误决策后,如何分析它的行为是值得深入研究的课题之一。
在如今的大模型研究中,可解释性已自成体系,即训练好大模型后,能否理解其学到的知识,以及为什么会输出这样的结果。周博磊对 DeepTech 表示:“我们希望在获得 AI 模型后,能够提升它的可解释性。因为可解释性不仅在于理解模型,还在于提升它与人类交互的能力。只有理解模型的运作,才能实现人与 AI 共同操作,从而达到更透明的相互理解与协作。”
在该实验室最近的工作中,研究人员利用 Coco Robotics 赠予实验室的送货机器人小车做了相关研究工作。例如,发表在 CVPR 2025 的论文《Vid2Sim:基于视频的逼真交互式城市导航模拟》(Vid2Sim: Realistic and Interactive Simulation from Video for Urban Navigation)[3]。通过拍摄一段视频,可将其重建成一个交互式环境,然后在该环境中训练 Coco 小车,进而能够直接在现实生活中部署。结果显示,Vid2Sim 显著提高了数字孪生和现实世界中的城市导航性能,成功率分别提高了 31.2% 和 68.3%。
(来源:https://arxiv.org/abs/2501.06693)
在另一项发表于 CVPR 2025 的论文《通过可扩展的城市模拟实现自主微移动》(Towards Autonomous Micromobility through Scalable Urban Simulation)中 [4],也研究了人行道机器人。研究人员利用 AI 代理协助人类操控小型出行设备(micromobility),为提升安全性和效率提供了一种可行的解决方案。他们构建了一种高性能机器人学习平台 URBAN-SIM,用于在交互式城市场景中大规模训练具身代理。此外,他们还针对四种机器人设计了涵盖 8 个场景的三项任务,包括轮式机器人(Coco Robotics 的送货机器人)、四足机器人(Unitree Go2)、轮腿机器人(Unitree B2-W)和人形机器人(Unitree G1)。
(来源:https://arxiv.org/abs/2505.00690)
介于家庭机器人和车道自动驾驶之间的应用场景
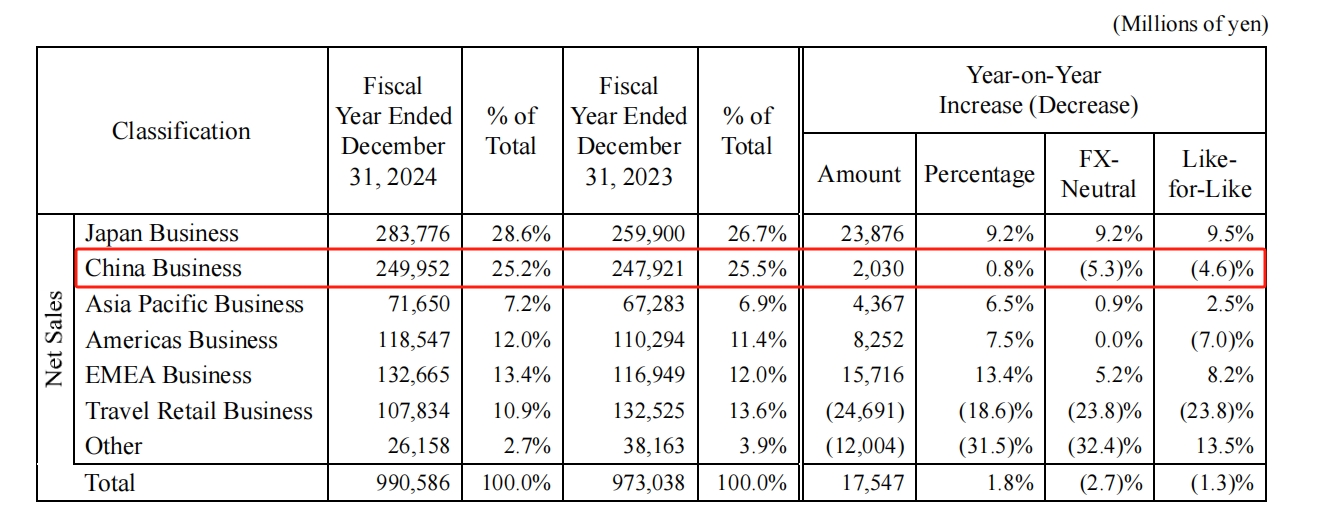
Coco Robotics 以实现配送机器人“最后一公里”为目标,其成立于 2020 年,联合创始人兼 CEO 扎克·拉什(Zach Rash)和联合创始人兼 CTO 布拉德·斯奎恰里尼(Brad Squicciarini)都是 UCLA 的校友。该公司在种子轮融资时获得了 OpenAI 的 CEO 山姆·奥特曼的支持,并与 OpenAI 一直保持数据方面的合作。在如今的大模型和 AI 浪潮中,Coco Robotics 的优势之一在于,其基于自身机器人小车送餐业务能够像特斯拉那样每天积累大量新的视频数据,而不是像其他大模型公司那样下载通用的互联网数据。
从美国市场来看,目前聚焦人行道自动驾驶机器人的主要公司“各有千秋”,除了 Coco Robotics 还包括 Starship Technologies 和 Serve Robotics。Starship Technologies 成立于 2014 年,专注于校园内餐厅的机器人配送业务,并在美国、英国、芬兰等国家的相关城市开展业务。Serve Robotics 公司自 2021 年从 Uber 分拆而来,已于 2024 年在纳斯达克上市。
周博磊与 Coco Robotics 的合作一方面源于双方技术发展方向的契合,另一方面也基于他们此前的合作。
尽管周博磊实验室之前做过自动驾驶的相关研究,但缺少自动驾驶真车,也没有场地做真车实验,更没有数据和计算资源和大型自动驾驶公司竞争。因此,他们切换了研究场景,转而研究人行道上的机器人——既能研究机器人学习课题,又可以在真实世界中做实验。与此同时,Coco Robotics 正处于 AI 转型阶段,随着其基于远程遥控配送车的业务发展成熟,公司计划向用 AI 模型补充和降低人工操作的方向转型。
需要了解的是,机器人研究中常见的划分方向是机械臂或家庭环境下的机器人方向,以及自动驾驶方向。现阶段,特定场景下的道路自动驾驶技术已基本接近实现,人们可使用 Waymo 和萝卜快跑等自动驾驶服务平台在国内外的相关城市打车出行。而人行道自动驾驶是介于家庭机器人和车道自动驾驶之间的过渡场景。该场景下的机器人需要完成的不仅是简单的视觉识别任务,还需要充分整合感知、理解、判断、决策和行动,这也是决定着 AI 是否能走进现实世界的关键因素。更重要的是,其还需要机器人和人类进行更有效的安全交互。周博磊进一步说道:“如果能解决好人行道上的机器人技术问题,它也可以应用到送货之外的其他方向,比如为人形机器人提供城市导航模块,为电动轮椅提供自动驾驶能力等。”
为更好地解决上述问题,新成立的 Physical AI Lab 将围绕三个方向开展研究:一是从数据层面,基于 Coco Robotics 累积的真实数据训练出适用于城市人行道的、配送机器人的基础模型或者移动性基础模型。“这相当于特斯拉基础款的 Autopilot 功能,它可以在高速等相对简单的情况下实现自动驾驶,然后把这个模型整合到现有的操作流程中。”周博磊说。二是通过仿真重建出与真实情况高度契合的虚拟环境对模型进行训练,以进一步提升机器人的决策和因果推断能力。三是让模型能从人类的操作中持续学习,将 AI 模型与人类操控者更好地协作整合
需要了解的是,这并不意味着在短时间内完全实现自动化,而是通过人机协作共同完成人行道导航任务:在较简单的人行道情况下,由 AI 操作系统;而在过马路等较复杂的情况下,则由人接手操作。他表示:“现阶段的遥控操作是一个操作者对应操作一辆送货车。我们希望在两三年内可以发展到一个操作者结合 AI 模型能同时操作 3 到 4 辆送货车,这将大大节省人力成本。”
产学研结合的双赢路径
从周博磊这次与 Coco Robotics 的携手,我们可以看到产学研紧密结合的一种双赢合作路径:公司可提供资金、通过业务积累的海量数据和实验平台,但面临招聘全职 AI 研究员工成本高和 AI 技术迭代慢的问题;而实验室由于没有真实数据,很难开展相关研究。通过合作,实验室的学生们可利用公司提供的真实世界数据和硬件平台开展研究、发表论文。尤为重要的是,相关研究成果开源发布后,能够进一步促进和回馈整个社区的技术发展。
周博磊指出,城市人行道自动驾驶领域目前尚处于技术早期阶段。在接下来的几年中,随着技术的发展、数据的积累和研究的深入,非常有可能有一条稳定的技术路线“突出重围”。
参考资料:
1.https://arxiv.org/abs/1512.04150
2.https://arxiv.org/abs/1704.05796
3.https://arxiv.org/abs/2501.06693
4.https://arxiv.org/abs/2505.00690
5.https://techcrunch.com/2025/06/11/sam-altman-backed-coco-robotics-raises-80m/
6.https://www.cocodelivery.com/
更新内容
一、修复bug,修改自动播放;优化产品用户体验。
二、 1.修复已知Bug。2.新服务。
三、修复已知bug;优化用户体验
四、1,交互全面优化,用户操作更加便捷高效;2,主题色更新,界面风格更加协调;3,增加卡片类个人数据
五、-千万商品随意挑选,大图展现商品细节-订单和物流查询实时同步-支持团购和名品特卖,更有手机专享等你抢-支付宝和银联多种支付方式,轻松下单,快捷支付-新浪微博,支付宝,QQ登录,不用注册也能购物-支持商品收藏,随时查询喜爱的商品和历史购物清单。
六、1.bug修复,提升用户体验;2.优化加载,体验更流程;3.提升安卓系统兼容性
七、1、修复部分机型bug;2、提高游戏流畅度;
















相关版本
- 中文名:独家丨周博磊加入机器人初创,致力实现人行道自动驾驶技术突破
- 包名:com.ejiaqrp.dtgen
- MD5:P7ENQIWOC1RTO1T6EP
查看所有 0条评论>网友评论
- 相关游戏
-








































- 更多>心动网络手游
-








































- 更多>mod游戏
-




































- 更多>像素rpg游戏
-


































-
2025-10-20
1

-
2025-10-20
2

-
2025-10-20
3

-
2025-10-20
4

-
2025-10-20
5

-
2025-10-20
6

-
2025-10-20
7

-
2025-10-20
8

-
2025-10-20
9

-
2025-10-20
10

-
2025-10-20
11

-
2025-10-20
12

-
2025-10-20
13
-
2025-10-20
14

-
2025-10-20
15
-
2025-10-20
16

-
2025-10-20
17
-
2025-10-20
18

-
2025-10-20
19

-
2025-10-20
20

-
2025-10-20
21
-
2025-10-20
22

-
2025-10-20
23

-
2025-10-20
24

-
2025-10-20
25

-
2025-10-20
26

-
2025-10-20
27

-
2025-10-20
28

-
2025-10-20
29

-
2025-10-20
30

-
2025-10-20
31

-
2025-10-20
32

-
2025-10-20
33

-
2025-10-20
34

-
2025-10-20
35

-
2025-10-20
36

-
2025-10-20
37

-
2025-10-20
38

-
2025-10-20
39

-
2025-10-20
40

-
2025-10-20
41

-
2025-10-20
42

-
2025-10-20
43

-
2025-10-20
44

-
2025-10-20
45

-
2025-10-20
46

-
2025-10-20
47

-
2025-10-20
48

-
2025-10-20
49

-
2025-10-20
50

-
2025-10-20
51

-
2025-10-20
52

-
2025-10-20
53

-
2025-10-20
54

-
2025-10-20
55

-
2025-10-20
56

-
2025-10-20
57

-
2025-10-20
58

-
2025-10-20
59

-
2025-10-20
60

-
2025-10-20
61

-
2025-10-20
62

-
2025-10-20
63

-
2025-10-20
64

-
2025-10-20
65

-
2025-10-20
66

-
2025-10-20
67

-
2025-10-20
68

-
2025-10-20
69

-
2025-10-20
70

-
2025-10-20
71

-
2025-10-20
72

-
2025-10-20
73

-
2025-10-20
74
-
2025-10-20
75

-
2025-10-20
76
-
2025-10-20
77

-
2025-10-20
78

-
2025-10-20
79

-
2025-10-20
80

-
2025-10-20
81

-
2025-10-20
82

-
2025-10-20
83

-
2025-10-20
84

-
2025-10-20
85

-
2025-10-20
86

-
2025-10-20
87

-
2025-10-20
88

-
2025-10-20
89
-
2025-10-20
90

-
2025-10-20
91

-
2025-10-20
92

-
2025-10-20
93

-
2025-10-20
94

-
2025-10-20
95

-
2025-10-20
96

-
2025-10-20
97
-
2025-10-20
98

-
2025-10-20
99

-
2025-10-20
100

-
2025-10-20
101

-
2025-10-20
102

-
2025-10-20
103

-
2025-10-20
104

-
2025-10-20
105

-
2025-10-20
106

-
2025-10-20
107

-
2025-10-20
108

-
2025-10-20
109

-
2025-10-20
110

-
2025-10-20
111

-
2025-10-20
112

-
2025-10-20
113

-
2025-10-20
114

-
2025-10-20
115

-
2025-10-20
116

-
2025-10-20
117
-
2025-10-20
118

-
2025-10-20
119

-
2025-10-20
120

-
2025-10-20
121

-
2025-10-20
122

-
2025-10-20
123

-
2025-10-20
124

-
2025-10-20
125

-
2025-10-20
126

-
2025-10-20
127

-
2025-10-20
128
-
2025-10-20
129

-
2025-10-20
130

-
2025-10-20
131

-
2025-10-20
132
-
2025-10-20
133

-
2025-10-20
134

-
2025-10-20
135

-
2025-10-20
136

-
2025-10-20
137

-
2025-10-20
138

-
2025-10-20
139

-
2025-10-20
140

-
2025-10-20
141

-
2025-10-20
142

-
2025-10-20
143

-
2025-10-20
144

-
2025-10-20
145

-
2025-10-20
146

-
2025-10-20
147

-
2025-10-20
148

-
2025-10-20
149

-
2025-10-20
150

-
2025-10-20
151

-
2025-10-20
152

-
2025-10-20
153

-
2025-10-20
154

-
2025-10-20
155

-
2025-10-20
156

-
2025-10-20
157
-
2025-10-20
158

-
2025-10-20
159

-
2025-10-20
160

-
2025-10-20
161

-
2025-10-20
162

-
2025-10-20
163

-
2025-10-20
164

-
2025-10-20
165

-
2025-10-20
166

-
2025-10-20
167

-
2025-10-20
168

-
2025-10-20
169

-
2025-10-20
170

-
2025-10-20
171

-
2025-10-20
172
-
2025-10-20
173

-
2025-10-20
174

-
2025-10-20
175

-
2025-10-20
176

-
2025-10-20
177

-
2025-10-20
178

-
2025-10-20
179

-
2025-10-20
180
-
2025-10-20
181

-
2025-10-20
182

-
2025-10-20
183

-
2025-10-20
184

-
2025-10-20
185

-
2025-10-20
186

-
2025-10-20
187

-
2025-10-20
188

-
2025-10-20
189

-
2025-10-20
190

-
2025-10-20
191

-
2025-10-20
192

-
2025-10-20
193

-
2025-10-20
194

-
2025-10-20
195
-
2025-10-20
196

-
2025-10-20
197

-
2025-10-20
198

-
2025-10-20
199

-
2025-10-20
200

-
2025-10-20
201

-
2025-10-20
202

-
2025-10-20
203

-
2025-10-20
204

-
2025-10-20
205

-
2025-10-20
206

-
2025-10-20
207

-
2025-10-20
208

-
2025-10-20
209
-
2025-10-20
210

-
2025-10-20
211

-
2025-10-20
212

-
2025-10-20
213

-
2025-10-20
214

-
2025-10-20
215

-
2025-10-20
216
-
2025-10-20
217
-
2025-10-20
218

-
2025-10-20
219

-
2025-10-20
220

-
2025-10-20
221

-
2025-10-20
222
-
2025-10-20
223

-
2025-10-20
224
-
2025-10-20
225

-
2025-10-20
226

-
2025-10-20
227

-
2025-10-20
228

-
2025-10-20
229

-
2025-10-20
230

-
2025-10-20
231

-
2025-10-20
232

-
2025-10-20
233

-
2025-10-20
234

-
2025-10-20
235

-
2025-10-20
236

-
2025-10-20
237

-
2025-10-20
238

-
2025-10-20
239

-
2025-10-20
240

-
2025-10-20
241

-
2025-10-20
242

-
2025-10-20
243

-
2025-10-20
244

-
2025-10-20
245

-
2025-10-20
246

-
2025-10-20
247

-
2025-10-20
248

-
2025-10-20
249

-
2025-10-20
250

-
2025-10-20
251

-
2025-10-20
252

-
2025-10-20
253

-
2025-10-20
254

-
2025-10-20
255

-
2025-10-20
256

-
2025-10-20
257

-
2025-10-20
258

-
2025-10-20
259

-
2025-10-20
260

-
2025-10-20
261

-
2025-10-20
262
-
2025-10-20
263

-
2025-10-20
264

-
2025-10-20
265

-
2025-10-20
266

-
2025-10-20
267

-
2025-10-20
268

-
2025-10-20
269

-
2025-10-20
270

-
2025-10-20
271

-
2025-10-20
272

-
2025-10-20
273

-
2025-10-20
274

-
2025-10-20
275
-
2025-10-20
276

-
2025-10-20
277

-
2025-10-20
278
-
2025-10-20
279

-
2025-10-20
280

-
2025-10-20
281

-
2025-10-20
282

-
2025-10-20
283

-
2025-10-20
284

-
2025-10-20
285

-
2025-10-20
286

-
2025-10-20
287
-
2025-10-20
288

-
2025-10-20
289

-
2025-10-20
290

-
2025-10-20
291

-
2025-10-20
292

-
2025-10-20
293

-
2025-10-20
294

-
2025-10-20
295
-
2025-10-20
296

-
2025-10-20
297

-
2025-10-20
298

-
2025-10-20
299

-
2025-10-20
300

-
2025-10-20
301

-
2025-10-20
302

-
2025-10-20
303

-
2025-10-20
304

-
2025-10-20
305

-
2025-10-20
306

-
2025-10-20
307

-
2025-10-20
308

-
2025-10-20
309

-
2025-10-20
310

-
2025-10-20
311

-
2025-10-20
312

-
2025-10-20
313
-
2025-10-20
314

-
2025-10-20
315

-
2025-10-20
316
-
2025-10-20
317

-
2025-10-20
318

-
2025-10-20
319

-
2025-10-20
320

-
2025-10-20
321

-
2025-10-20
322

-
2025-10-20
323

-
2025-10-20
324

-
2025-10-20
325

-
2025-10-20
326
-
2025-10-20
327

-
2025-10-20
328

-
2025-10-20
329

-
2025-10-20
330

-
2025-10-20
331

-
2025-10-20
332

-
2025-10-20
333
-
2025-10-20
334

-
2025-10-20
335
-
2025-10-20
336

-
2025-10-20
337

-
2025-10-20
338

-
2025-10-20
339

-
2025-10-20
340

-
2025-10-20
341

-
2025-10-20
342

-
2025-10-20
343

-
2025-10-20
344
-
2025-10-20
345

-
2025-10-20
346

-
2025-10-20
347
-
2025-10-20
348
-
2025-10-20
349

-
2025-10-20
350

-
2025-10-20
351

-
2025-10-20
352
-
2025-10-20
353

-
2025-10-20
354

-
2025-10-20
355

-
2025-10-20
356

-
2025-10-20
357

-
2025-10-20
358

-
2025-10-20
359

-
2025-10-20
360

-
2025-10-20
361

-
2025-10-20
362

-
2025-10-20
363

-
2025-10-20
364

-
2025-10-20
365

-
2025-10-20
366
-
2025-10-20
367

-
2025-10-20
368

-
2025-10-20
369

-
2025-10-20
370

-
2025-10-20
371

-
2025-10-20
372

-
2025-10-20
373

-
2025-10-20
374

-
2025-10-20
375

-
2025-10-20
376

-
2025-10-20
377

-
2025-10-20
378
-
2025-10-20
379

-
2025-10-20
380

-
2025-10-20
381

-
2025-10-20
382

-
2025-10-20
383

-
2025-10-20
384

-
2025-10-20
385

-
2025-10-20
386

-
2025-10-20
387

-
2025-10-20
388

-
2025-10-20
389

-
2025-10-20
390
-
2025-10-20
391

-
2025-10-20
392

-
2025-10-20
393

-
2025-10-20
394

-
2025-10-20
395

-
2025-10-20
396
-
2025-10-20
397

-
2025-10-20
398
-
2025-10-20
399

-
2025-10-20
400

-
2025-10-20
1

-
2025-10-20
2

-
2025-10-20
3

-
2025-10-20
4

-
2025-10-20
5

-
2025-10-20
6
-
2025-10-20
7

-
2025-10-20
8

-
2025-10-20
9

-
2025-10-20
10

-
2025-10-20
11

-
2025-10-20
12
-
2025-10-20
13

-
2025-10-20
14

-
2025-10-20
15

-
2025-10-20
16
-
2025-10-20
17

-
2025-10-20
18

-
2025-10-20
19

-
2025-10-20
20

-
2025-10-20
21

-
2025-10-20
22

-
2025-10-20
23

-
2025-10-20
24

-
2025-10-20
25

-
2025-10-20
26

-
2025-10-20
27

-
2025-10-20
28

-
2025-10-20
29

-
2025-10-20
30

-
2025-10-20
31

-
2025-10-20
32

-
2025-10-20
33

-
2025-10-20
34

-
2025-10-20
35

-
2025-10-20
36

-
2025-10-20
37

-
2025-10-20
38
-
2025-10-20
39

-
2025-10-20
40

-
2025-10-20
41

-
2025-10-20
42

-
2025-10-20
43

-
2025-10-20
44

-
2025-10-20
45

-
2025-10-20
46

-
2025-10-20
47

-
2025-10-20
48
-
2025-10-20
49

-
2025-10-20
50

-
2025-10-20
51

-
2025-10-20
52

-
2025-10-20
53

-
2025-10-20
54

-
2025-10-20
55

-
2025-10-20
56

-
2025-10-20
57

-
2025-10-20
58

-
2025-10-20
59

-
2025-10-20
60

-
2025-10-20
61

-
2025-10-20
62
-
2025-10-20
63

-
2025-10-20
64

-
2025-10-20
65

-
2025-10-20
66

-
2025-10-20
67

-
2025-10-20
68

-
2025-10-20
69

-
2025-10-20
70

-
2025-10-20
71

-
2025-10-20
72

-
2025-10-20
73

-
2025-10-20
74

-
2025-10-20
75

-
2025-10-20
76

-
2025-10-20
77

-
2025-10-20
78
-
2025-10-20
79

-
2025-10-20
80

-
2025-10-20
81

-
2025-10-20
82

-
2025-10-20
83

-
2025-10-20
84

-
2025-10-20
85
-
2025-10-20
86

-
2025-10-20
87

-
2025-10-20
88

-
2025-10-20
89

-
2025-10-20
90

-
2025-10-20
91

-
2025-10-20
92

-
2025-10-20
93

-
2025-10-20
94

-
2025-10-20
95

-
2025-10-20
96

-
2025-10-20
97

-
2025-10-20
98

-
2025-10-20
99

-
2025-10-20
100

